
GAN Pytorch
Published:
![]()
Introduction to GAN
In this notebook, I will experiment various types of GAN model with PyTorch which benchmark on CIFAR-10 dataset. The models will be able to generate new image after training on the dataset. Datasets available at: https://paperswithcode.com/sota/image-generation-on-cifar-10
Library
from collections import defaultdict
import copy
import random
import os
import shutil
from urllib.request import urlretrieve
import numpy as np
import matplotlib.pyplot as plt
from tqdm.notebook import tqdm
import torch
import torch.backends.cudnn as cudnn
import torch.nn as nn
import torch.nn.functional as F
from torch import optim
from torch.utils.data import Dataset, DataLoader
from torchvision.datasets import CIFAR10
import torchvision.transforms as transforms
from torchvision.utils import make_grid
from tqdm.notebook import tqdm
from multiprocessing import Pool
cudnn.benchmark = True
from torchsummary import summary
import pickle
import pandas as pd
import time
import random
#fix seed for stable training
SEED = 42
random.seed(SEED)
np.random.seed(SEED)
torch.manual_seed(SEED)
torch.cuda.manual_seed(SEED)
torch.backends.cudnn.deterministic = True
Config
learning_rate = 0.0002
#device
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
n_epoch = 30
n_critic = 4
batch_size = 32
num_workers = 2
img_size = 32 * 32 * 3
latent_dim = 100
Data Preporcessing
# simple transform
transform = transforms.Compose([transforms.ToTensor(), transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))])
#dataset
train_data = CIFAR10(root='./data', train=True, download=True, transform=transform)
training_data = DataLoader(train_data, batch_size=batch_size, shuffle=True, num_workers= num_workers)
test_data = CIFAR10(root='./data', train=False, download=True, transform=transform)
testing_data = torch.utils.data.DataLoader(test_data, batch_size=4, shuffle=False, num_workers=2)
# classes
classes = ('plane', 'car', 'bird', 'cat', 'deer', 'dog', 'frog', 'horse', 'ship', 'truck')
Files already downloaded and verified
Files already downloaded and verified
# show sample image
def imshow(img):
plt.figure(figsize=(8, 16))
img = img / 2 + 0.5 # unnormalize
npimg = img.numpy()
plt.imshow(np.transpose(npimg, (1, 2, 0)))
plt.show()
# get some random training images
dataiter = iter(training_data)
images, labels = next(iter(training_data))
# show images
num_show = 5
imshow(make_grid(images[:num_show]))
# print labels
print(' '.join('%5s' % classes[labels[j]] for j in range(num_show)))
ship horse car frog bird
Model 1: GAN-MLP
Discriminator
class Discriminator(nn.Module):
def __init__(self, input_size=img_size):
super(Discriminator, self).__init__()
self.mlp = nn.Sequential(
nn.Linear(32 * 32 * 3, 512),
nn.ReLU(inplace=True),
nn.Linear(512, 256),
nn.ReLU(inplace=True),
nn.Linear(256, 1)
)
def forward(self, x):
x = x.reshape(x.shape[0], -1)
x = self.mlp(x)
return x
Generator
class Generator(nn.Module):
def __init__(self, latent_dim=latent_dim, output_size=img_size):
super(Generator, self).__init__()
self.mlp = nn.Sequential(
nn.Linear(latent_dim, 256),
nn.ReLU(inplace=True),
nn.Linear(256, 512),
nn.ReLU(inplace=True),
nn.Linear(512, output_size)
)
def forward(self, x):
x = x.reshape(x.shape[0], -1)
x = self.mlp(x)
return x
Optimization
#model
D = Discriminator().to(device)
G = Generator().to(device)
#loss funcgion
criterion = nn.BCEWithLogitsLoss()
#optimization
opt_g = optim.Adam(G.parameters(), lr=learning_rate, betas=(0.5, 0.999))
opt_d = optim.Adam(D.parameters(), lr=learning_rate, betas=(0.5, 0.999))
Training function
def epoch_time(start_time, end_time):
elapsed_time = end_time - start_time
elapsed_mins = int(elapsed_time / 60)
elapsed_secs = int(elapsed_time - (elapsed_mins * 60))
return elapsed_mins, elapsed_secs
def training(D, G, criterion, opt_d, opt_g, latent_dim, training_data, n_epoch, n_critic, freq_save=5, model_type='MLP'):
for epoch in tqdm(range(1, n_epoch + 1)):
# put train mode
G.train()
D.train()
start_time = time.monotonic()
for real_x, _ in training_data:
real_x = real_x.to(device)
batch = real_x.size(0)
#label for real/fake
if model_type == 'MLP':
flag_real = torch.ones([batch, 1], dtype=torch.float64).to(device)
flag_fake = torch.zeros([batch, 1], dtype=torch.float64).to(device)
elif model_type == 'CNN':
flag_real = torch.ones([batch], dtype=torch.float64).to(device)
flag_fake = torch.zeros([batch], dtype=torch.float64).to(device)
# training D
for _ in range(n_critic):
D.zero_grad()
if model_type == 'MLP':
z = torch.randn(batch, latent_dim).to(device)
elif model_type == 'CNN':
z = torch.randn(batch, latent_dim, 1, 1).to(device)
#generate image
fake_x = G(z)
# output real
out_real = D(real_x)
out_fake = D(fake_x)
# loss real and fake
loss_real = criterion(out_real, flag_real)
loss_fake = criterion(out_fake, flag_fake)
# discriminator loss
t_loss = loss_real + loss_fake
t_loss.backward()
#update weights D
opt_d.step()
# training G
G.zero_grad()
# start with noise
if model_type == 'MLP':
z = torch.randn(batch, latent_dim).to(device)
elif model_type == 'CNN':
z = torch.randn(batch, latent_dim, 1, 1).to(device)
# z = torch.randn(batch, latent_dim).to(device)
# fake images
fake_x = G(z)
# predict for fake images
out_gen = D(fake_x)
# gen loss
gen_loss = criterion(out_gen, flag_real)
gen_loss.backward()
# update weights G
opt_g.step()
end_time = time.monotonic()
#log loss
epoch_mins, epoch_secs = epoch_time(start_time, end_time)
print(f'Epoch: {epoch:02} | Epoch Time: {epoch_mins}m {epoch_secs}s')
print(f'\tDiscriminator Loss: {t_loss.item():.3f} ')
print(f'\tGenerator Loss: {gen_loss.item():.3f} ')
#save weights
if (epoch % freq_save == 0) or (epoch == 1):
gen_img = fake_x.detach().cpu()
gen_img = gen_img.reshape(-1, 3, 32, 32)
imshow(make_grid(gen_img[:5]))
torch.save(G.state_dict(), f"{model_type}_G_%04d.pt" % epoch)
torch.save(D.state_dict(), f"{model_type}_D_%04d.pt" % epoch)
#start training
training(D, G, criterion, opt_d, opt_g, latent_dim, training_data, n_epoch, n_critic)
0%| | 0/30 [00:00<?, ?it/s]
Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).
Epoch: 01 | Epoch Time: 0m 28s
Discriminator Loss: 0.008
Generator Loss: 6.124
Epoch: 02 | Epoch Time: 0m 29s
Discriminator Loss: 0.011
Generator Loss: 6.455
Epoch: 03 | Epoch Time: 0m 27s
Discriminator Loss: 0.004
Generator Loss: 5.924
Epoch: 04 | Epoch Time: 0m 23s
Discriminator Loss: 0.030
Generator Loss: 7.780
Epoch: 05 | Epoch Time: 0m 26s
Discriminator Loss: 0.135
Generator Loss: 4.733
Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).
Epoch: 06 | Epoch Time: 0m 25s
Discriminator Loss: 0.059
Generator Loss: 4.474
Epoch: 07 | Epoch Time: 0m 27s
Discriminator Loss: 0.089
Generator Loss: 5.345
Epoch: 08 | Epoch Time: 0m 24s
Discriminator Loss: 0.070
Generator Loss: 4.423
Epoch: 09 | Epoch Time: 0m 27s
Discriminator Loss: 0.222
Generator Loss: 3.542
Epoch: 10 | Epoch Time: 0m 26s
Discriminator Loss: 0.276
Generator Loss: 3.533
Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).
Epoch: 11 | Epoch Time: 0m 27s
Discriminator Loss: 0.204
Generator Loss: 2.726
Epoch: 12 | Epoch Time: 0m 27s
Discriminator Loss: 0.169
Generator Loss: 3.144
Epoch: 13 | Epoch Time: 0m 26s
Discriminator Loss: 0.383
Generator Loss: 1.990
Epoch: 14 | Epoch Time: 0m 26s
Discriminator Loss: 0.186
Generator Loss: 2.276
Epoch: 15 | Epoch Time: 0m 28s
Discriminator Loss: 0.187
Generator Loss: 2.740
Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).
Epoch: 16 | Epoch Time: 0m 28s
Discriminator Loss: 0.395
Generator Loss: 2.919
Epoch: 17 | Epoch Time: 0m 22s
Discriminator Loss: 0.483
Generator Loss: 2.390
Epoch: 18 | Epoch Time: 0m 29s
Discriminator Loss: 0.288
Generator Loss: 2.797
Epoch: 19 | Epoch Time: 0m 28s
Discriminator Loss: 0.246
Generator Loss: 2.814
Epoch: 20 | Epoch Time: 0m 27s
Discriminator Loss: 0.176
Generator Loss: 2.237
Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).
Epoch: 21 | Epoch Time: 0m 23s
Discriminator Loss: 0.430
Generator Loss: 2.027
Epoch: 22 | Epoch Time: 0m 28s
Discriminator Loss: 0.589
Generator Loss: 2.444
Epoch: 23 | Epoch Time: 0m 23s
Discriminator Loss: 0.602
Generator Loss: 2.414
Epoch: 24 | Epoch Time: 0m 25s
Discriminator Loss: 0.381
Generator Loss: 3.128
Epoch: 25 | Epoch Time: 0m 28s
Discriminator Loss: 0.250
Generator Loss: 1.678
Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).
Epoch: 26 | Epoch Time: 0m 21s
Discriminator Loss: 0.176
Generator Loss: 2.426
Epoch: 27 | Epoch Time: 0m 28s
Discriminator Loss: 0.271
Generator Loss: 2.696
Epoch: 28 | Epoch Time: 0m 30s
Discriminator Loss: 0.710
Generator Loss: 2.058
Epoch: 29 | Epoch Time: 0m 23s
Discriminator Loss: 0.305
Generator Loss: 2.039
Epoch: 30 | Epoch Time: 0m 27s
Discriminator Loss: 0.375
Generator Loss: 2.080
Predict function
def generate_img(G, latent_dim, device, number_img=100):
#random z
z = torch.randn(number_img, latent_dim).to(device)
# fake images
fake_x = G(z)
gen_img = fake_x.detach().cpu()
gen_img = gen_img.reshape(-1, 3, 32, 32)
return gen_img
#load model generating
G.load_state_dict(torch.load("MLP_G_0026.pt"))
gen_img = generate_img(G, latent_dim, device, number_img=100)
#visualize generate image
num_show = 5
imshow(make_grid(gen_img[:num_show]))
Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).
Model 2: Deep Convolutional GAN (DC-GAN)
Discriminator
class Discriminator(nn.Module):
def __init__(self, in_ch=3, img_size=32):
super(Discriminator, self).__init__()
n_layer = int(np.log2(img_size)) - 2
self.model = nn.Sequential()
features = 32
self.model.add_module("Conv_first", nn.Conv2d(in_ch, features, 4, 2, 1, bias=True))
self.model.add_module("Act_first", nn.LeakyReLU(negative_slope=0.2))
in_features = features
for i in range(n_layer):
out_features = features * 2
self.model.add_module('Conv%d' % i, nn.Conv2d(in_features, out_features, 4, 2, 1, bias=True))
self.model.add_module('BN%d' % i, nn.BatchNorm2d(out_features))
self.model.add_module('Act%d' % i, nn.LeakyReLU(negative_slope=0.2))
in_features = out_features
# last layer
self.model.add_module('Conv_last', nn.Conv2d(in_features, 1, 2, 1, bias=True))
self.weight_init()
def weight_init(self):
for m in self.model:
if isinstance(m, nn.ConvTranspose2d) or isinstance(m, nn.Conv2d):
m.weight.data.normal_(0.0, 0.02)
m.bias.data.zero_()
def forward(self, x):
return self.model(x).view(-1)
Generator
class Generator(nn.Module):
def __init__(self, latent_dim=100, out_ch=3, img_size=32):
super(Generator, self).__init__()
n_layer = int(np.log2(img_size)) - 2
self.model = nn.Sequential()
features = 512
self.model.add_module('Deconv_first', nn.ConvTranspose2d(latent_dim, features, 2, 2, bias=True))
self.model.add_module('BN_first', nn.BatchNorm2d(features))
self.model.add_module('Act_first', nn.ReLU(inplace=True))
in_features = features
for i in range(n_layer):
out_features= in_features // 2
self.model.add_module('Deconv%d' % i, nn.ConvTranspose2d(in_features, out_features, 4, 2, 1, bias=True))
self.model.add_module('BN%d' % i, nn.BatchNorm2d(out_features))
self.model.add_module('Act%d' % i, nn.ReLU(inplace=True))
in_features = out_features
#last layer
self.model.add_module('Deconv_last', nn.ConvTranspose2d(in_features, out_ch, 2, 2, bias=True))
self.model.add_module('Act_last', nn.Tanh())
self.weight_init()
def weight_init(self):
for m in self.model:
if isinstance(m, nn.ConvTranspose2d) or isinstance(m, nn.Conv2d):
m.weight.data.normal_(0.0, 0.02)
m.bias.data.zero_()
def forward(self, z):
return self.model(z)
Training
#model
D = Discriminator().to(device)
G = Generator().to(device)
#loss funcgion
criterion = nn.BCEWithLogitsLoss()
#optimization
opt_g = optim.Adam(G.parameters(), lr=learning_rate, betas=(0.5, 0.999))
opt_d = optim.Adam(D.parameters(), lr=learning_rate, betas=(0.5, 0.999))
#start training
training(D, G, criterion, opt_d, opt_g, latent_dim, training_data, n_epoch, n_critic=20, model_type='CNN')
0%| | 0/20 [00:00<?, ?it/s]
Epoch: 01 | Epoch Time: 0m 26s
Discriminator Loss: 1.538
Generator Loss: 1.736
Epoch: 02 | Epoch Time: 0m 25s
Discriminator Loss: 0.786
Generator Loss: 2.399
Epoch: 03 | Epoch Time: 0m 26s
Discriminator Loss: 0.333
Generator Loss: 3.380
Epoch: 04 | Epoch Time: 0m 26s
Discriminator Loss: 0.914
Generator Loss: 2.792
Epoch: 05 | Epoch Time: 0m 25s
Discriminator Loss: 0.484
Generator Loss: 2.795
Epoch: 06 | Epoch Time: 0m 28s
Discriminator Loss: 0.355
Generator Loss: 2.292
Epoch: 07 | Epoch Time: 0m 28s
Discriminator Loss: 0.486
Generator Loss: 2.829
Epoch: 08 | Epoch Time: 0m 24s
Discriminator Loss: 0.918
Generator Loss: 3.041
Epoch: 09 | Epoch Time: 0m 26s
Discriminator Loss: 1.595
Generator Loss: 2.786
Epoch: 10 | Epoch Time: 0m 26s
Discriminator Loss: 1.277
Generator Loss: 1.260
Epoch: 11 | Epoch Time: 0m 25s
Discriminator Loss: 0.260
Generator Loss: 4.352
Epoch: 12 | Epoch Time: 0m 22s
Discriminator Loss: 0.855
Generator Loss: 0.963
Epoch: 13 | Epoch Time: 0m 25s
Discriminator Loss: 0.430
Generator Loss: 4.613
Epoch: 14 | Epoch Time: 0m 19s
Discriminator Loss: 0.197
Generator Loss: 4.480
Epoch: 15 | Epoch Time: 0m 23s
Discriminator Loss: 0.242
Generator Loss: 3.336
Epoch: 16 | Epoch Time: 0m 25s
Discriminator Loss: 0.894
Generator Loss: 2.684
Epoch: 17 | Epoch Time: 0m 27s
Discriminator Loss: 1.070
Generator Loss: 5.525
Epoch: 18 | Epoch Time: 0m 25s
Discriminator Loss: 0.422
Generator Loss: 1.627
Epoch: 19 | Epoch Time: 0m 26s
Discriminator Loss: 0.655
Generator Loss: 3.276
Epoch: 20 | Epoch Time: 0m 28s
Discriminator Loss: 1.469
Generator Loss: 0.255
Predict
def generate_img(G, latent_dim, device, number_img=100, model_type='CNN'):
#random z
if model_type == 'MLP':
z = torch.randn(number_img, latent_dim).to(device)
elif model_type == 'CNN':
z = torch.randn(number_img, latent_dim, 1, 1).to(device)
# fake images
fake_x = G(z)
gen_img = fake_x.detach().cpu()
gen_img = gen_img.reshape(-1, 3, 32, 32)
return gen_img
#load model generating
G.load_state_dict(torch.load("CNN_G_0020.pt"))
gen_img = generate_img(G, latent_dim, device, number_img=100, model_type='CNN')
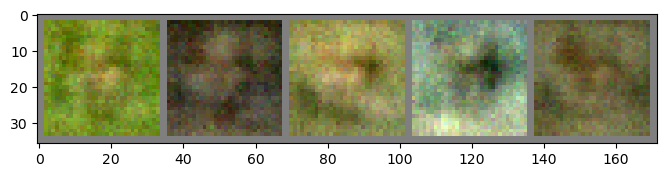
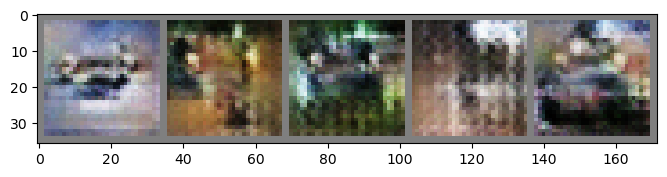
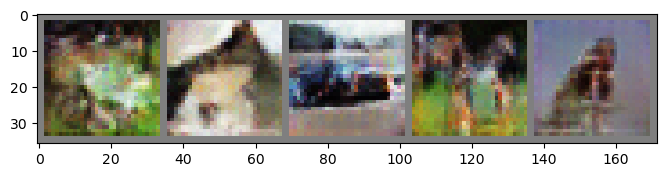
#visualize generate image
num_show = 5
imshow(make_grid(gen_img[:num_show]))
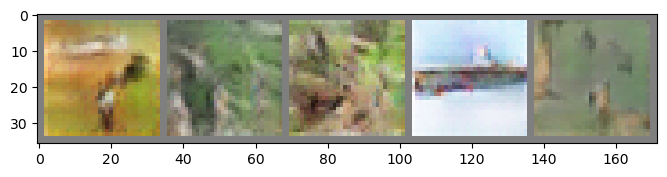
Comparing with MLP-GAN, DC-GAN show better loss results after 20 epochs. As a result, generating images show better images with more detail about color and object.
Conditional DC-GAN
Discriminator
class Discriminator(nn.Module):
def __init__(self, in_ch=3, num_class=10, img_size=32):
super(Discriminator, self).__init__()
n_layer = int(np.log2(img_size)) - 2
self.model = nn.Sequential()
features = 32
self.model.add_module("Conv_first", nn.Conv2d(in_ch+num_class, features, 4, 2, 1, bias=True))
self.model.add_module("Act_first", nn.LeakyReLU(negative_slope=0.2))
in_features = features
for i in range(n_layer):
out_features = features * 2
self.model.add_module('Conv%d' % i, nn.Conv2d(in_features, out_features, 4, 2, 1, bias=True))
self.model.add_module('BN%d' % i, nn.BatchNorm2d(out_features))
self.model.add_module('Act%d' % i, nn.LeakyReLU(negative_slope=0.2))
in_features = out_features
# last layer
self.model.add_module('Conv_last', nn.Conv2d(in_features, 1, 2, 1, bias=True))
self.weight_init()
def weight_init(self):
for m in self.model:
if isinstance(m, nn.ConvTranspose2d) or isinstance(m, nn.Conv2d):
m.weight.data.normal_(0.0, 0.02)
m.bias.data.zero_()
def forward(self, x):
return self.model(x).view(-1)
Generator
class Generator(nn.Module):
def __init__(self, latent_dim=100, num_class=10, out_ch=3, img_size=32):
super(Generator, self).__init__()
n_layer = int(np.log2(img_size)) - 2
self.model = nn.Sequential()
features = 512
self.model.add_module('Deconv_first', nn.ConvTranspose2d(latent_dim+num_class, features, 2, 2, bias=True))
self.model.add_module('BN_first', nn.BatchNorm2d(features))
self.model.add_module('Act_first', nn.ReLU(inplace=True))
in_features = features
for i in range(n_layer):
out_features= in_features // 2
self.model.add_module('Deconv%d' % i, nn.ConvTranspose2d(in_features, out_features, 4, 2, 1, bias=True))
self.model.add_module('BN%d' % i, nn.BatchNorm2d(out_features))
self.model.add_module('Act%d' % i, nn.ReLU(inplace=True))
in_features = out_features
#last layer
self.model.add_module('Deconv_last', nn.ConvTranspose2d(in_features, out_ch, 2, 2, bias=True))
self.model.add_module('Act_last', nn.Tanh())
self.weight_init()
def weight_init(self):
for m in self.model:
if isinstance(m, nn.ConvTranspose2d) or isinstance(m, nn.Conv2d):
m.weight.data.normal_(0.0, 0.02)
m.bias.data.zero_()
def forward(self, z):
return self.model(z)
#model
D = Discriminator().to(device)
G = Generator().to(device)
#loss funcgion
criterion = nn.BCEWithLogitsLoss()
#optimization
opt_g = optim.Adam(G.parameters(), lr=learning_rate, betas=(0.5, 0.999))
opt_d = optim.Adam(D.parameters(), lr=learning_rate, betas=(0.5, 0.999))
def training_condition(D, G, criterion, opt_d, opt_g, latent_dim, training_data, n_epoch, n_critic, freq_save=5, num_class=10, model_type='CNN'):
for epoch in tqdm(range(1, n_epoch + 1)):
# put train mode
G.train()
D.train()
start_time = time.monotonic()
for real_x, y in training_data:
real_x = real_x.to(device)
#one hot
onehot = torch.eye(num_class)[y].to(device)[:, :, None, None]
batch = real_x.size(0)
onehot_expand = onehot.expand(batch, onehot.size(1), real_x.size(2), real_x.size(3))
#label for real/fake
if model_type == 'MLP':
flag_real = torch.ones([batch, 1], dtype=torch.float64).to(device)
flag_fake = torch.zeros([batch, 1], dtype=torch.float64).to(device)
elif model_type == 'CNN':
flag_real = torch.ones([batch], dtype=torch.float64).to(device)
flag_fake = torch.zeros([batch], dtype=torch.float64).to(device)
# training D
for _ in range(n_critic):
D.zero_grad()
if model_type == 'MLP':
z = torch.randn(batch, latent_dim+num_class).to(device)
elif model_type == 'CNN':
z = torch.randn(batch, latent_dim+num_class, 1, 1).to(device)
#generate image
z[:, :num_class] = onehot
fake_x = G(z)
_real_x = torch.cat((real_x, onehot_expand), dim=1)
_fake_x = torch.cat((fake_x, onehot_expand), dim=1)
# output real
out_real = D(_real_x)
out_fake = D(_fake_x)
# loss real and fake
loss_real = criterion(out_real, flag_real)
loss_fake = criterion(out_fake, flag_fake)
# discriminator loss
t_loss = loss_real + loss_fake
t_loss.backward()
#update weights D
opt_d.step()
# training G
G.zero_grad()
# start with noise
if model_type == 'MLP':
z = torch.randn(batch, latent_dim+num_class).to(device)
elif model_type == 'CNN':
z = torch.randn(batch, latent_dim+num_class, 1, 1).to(device)
# z = torch.randn(batch, latent_dim).to(device)
# fake images
z[:, :num_class] = onehot
fake_x = G(z)
_fake_x = torch.cat((fake_x, onehot_expand), dim=1)
# predict for fake images
out_gen = D(_fake_x)
# gen loss
gen_loss = criterion(out_gen, flag_real)
gen_loss.backward()
# update weights G
opt_g.step()
end_time = time.monotonic()
#log loss
epoch_mins, epoch_secs = epoch_time(start_time, end_time)
print(f'Epoch: {epoch:02} | Epoch Time: {epoch_mins}m {epoch_secs}s')
print(f'\tDiscriminator Loss: {t_loss.item():.3f} ')
print(f'\tGenerator Loss: {gen_loss.item():.3f} ')
#save weights
if (epoch % freq_save == 0) or (epoch == 1):
gen_img = fake_x.detach().cpu()
gen_img = gen_img.reshape(-1, 3, 32, 32)
imshow(make_grid(gen_img[:5]))
torch.save(G.state_dict(), f"{model_type}_Condition_G_%04d.pt" % epoch)
torch.save(D.state_dict(), f"{model_type}_Condition_D_%04d.pt" % epoch)
#start training
training_condition(D, G, criterion, opt_d, opt_g, latent_dim, training_data, n_epoch=20, n_critic=1, model_type='CNN')
0%| | 0/20 [00:00<?, ?it/s]
Epoch: 01 | Epoch Time: 0m 17s
Discriminator Loss: 0.987
Generator Loss: 1.286
Epoch: 02 | Epoch Time: 0m 23s
Discriminator Loss: 0.832
Generator Loss: 1.379
Epoch: 03 | Epoch Time: 0m 21s
Discriminator Loss: 0.934
Generator Loss: 1.484
Epoch: 04 | Epoch Time: 0m 22s
Discriminator Loss: 1.282
Generator Loss: 1.732
Epoch: 05 | Epoch Time: 0m 19s
Discriminator Loss: 1.676
Generator Loss: 0.329
Epoch: 06 | Epoch Time: 0m 19s
Discriminator Loss: 1.201
Generator Loss: 1.208
Epoch: 07 | Epoch Time: 0m 18s
Discriminator Loss: 1.406
Generator Loss: 1.425
Epoch: 08 | Epoch Time: 0m 23s
Discriminator Loss: 1.152
Generator Loss: 0.310
Epoch: 09 | Epoch Time: 0m 21s
Discriminator Loss: 1.408
Generator Loss: 0.653
Epoch: 10 | Epoch Time: 0m 23s
Discriminator Loss: 1.517
Generator Loss: 1.170
Epoch: 11 | Epoch Time: 0m 22s
Discriminator Loss: 0.981
Generator Loss: 0.902
Epoch: 12 | Epoch Time: 0m 22s
Discriminator Loss: 0.657
Generator Loss: 1.078
Epoch: 13 | Epoch Time: 0m 21s
Discriminator Loss: 0.721
Generator Loss: 1.249
Epoch: 14 | Epoch Time: 0m 19s
Discriminator Loss: 0.763
Generator Loss: 1.310
Epoch: 15 | Epoch Time: 0m 19s
Discriminator Loss: 1.750
Generator Loss: 1.223
Epoch: 16 | Epoch Time: 0m 20s
Discriminator Loss: 1.497
Generator Loss: 2.186
Epoch: 17 | Epoch Time: 0m 22s
Discriminator Loss: 0.802
Generator Loss: 1.196
Epoch: 18 | Epoch Time: 0m 21s
Discriminator Loss: 0.863
Generator Loss: 0.892
Epoch: 19 | Epoch Time: 0m 23s
Discriminator Loss: 1.440
Generator Loss: 0.778
Epoch: 20 | Epoch Time: 0m 24s
Discriminator Loss: 1.175
Generator Loss: 1.230
Predict
def generate_condition_img(G, latent_dim, device,num_class=10, number_img=100, model_type='CNN'):
#random z
if model_type == 'MLP':
z = torch.randn(number_img, latent_dim+num_class).to(device)
elif model_type == 'CNN':
z = torch.randn(number_img, latent_dim+num_class, 1, 1).to(device)
# fake images
c = np.asarray([random.randint(0,num_class-1) for i in range(number_img)], dtype=np.int32)
onehot = torch.eye(num_class)[c].to(device)[:,:,None,None]
z[:, :num_class] = onehot
fake_x = G(z)
gen_img = fake_x.detach().cpu()
gen_img = gen_img.reshape(-1, 3, 32, 32)
return gen_img
#load model generating
G.load_state_dict(torch.load("CNN_Condition_G_0020.pt"))
gen_img = generate_condition_img(G, latent_dim, device, number_img=100, model_type='CNN')
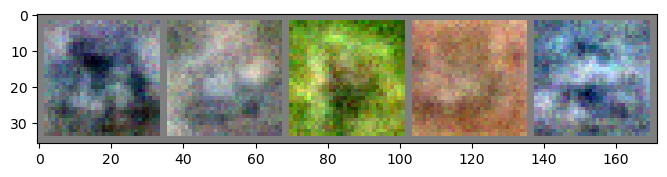
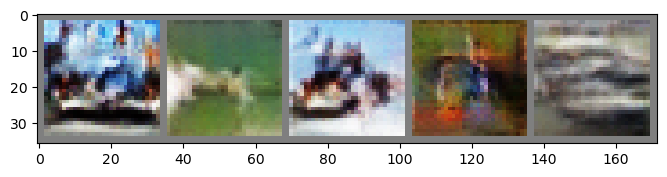
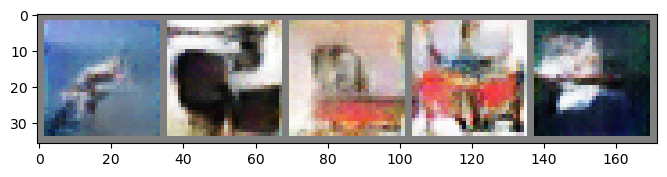
#visualize generate image
num_show = 5
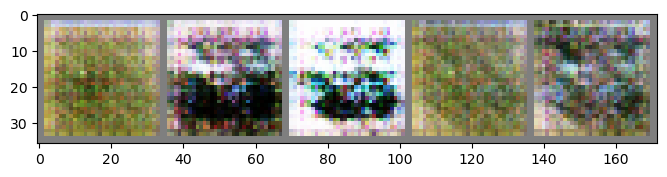
imshow(make_grid(gen_img[:num_show]))
Conditional DC-GAN show better results compared with MLP-GAN but the result is not good as DC-GAN.
Cycle-GAN
# create dataset for CIFAR10
class CustomCIFAR10(Dataset):
def __init__(self, transform_a, transform_b):
self.transform_a = transform_a
self.transform_b = transform_b
self.cifar = CIFAR10(root='./data', train=True, download=True)
def __len__(self):
return len(self.cifar)
def __getitem__(self, idx):
image_a = self.cifar[idx][0]
image_b = self.cifar[idx][0]
image_a = self.transform_a(image_a)
image_b = self.transform_b(image_b)
return image_a, image_b
#transform data
transform_a = transforms.Compose([transforms.Grayscale(num_output_channels=3), transforms.ToTensor(), transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))])
transform_b = transforms.Compose([transforms.ToTensor(), transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))])
cycle_train_data = CustomCIFAR10(transform_a, transform_b)
cycle_training_data = DataLoader(cycle_train_data, batch_size=batch_size, shuffle=True, num_workers= num_workers)
Files already downloaded and verified
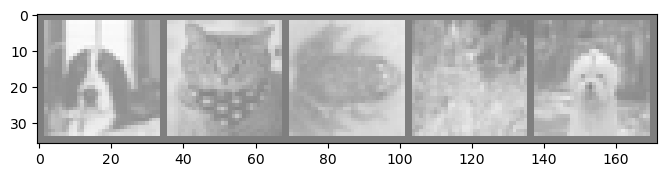
# get some random training images
dataiter = iter(cycle_training_data)
images_a, images_b = next(iter(cycle_training_data))
# show images source
num_show = 5
imshow(make_grid(images_a[:num_show]))
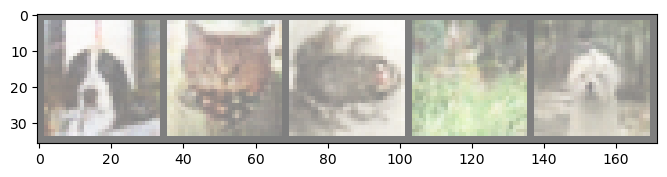
# show images dest
num_show = 5
imshow(make_grid(images_b[:num_show]))
class ResBlock(nn.Module):
def __init__(self, features):
super(ResBlock, self).__init__()
block_list = []
self.block = self.make_block(block_list, features)
def make_block(self, modules_list, features):
modules_list.append(nn.ReflectionPad2d(1))
modules_list.append(nn.Conv2d(features, features, kernel_size=3, stride=1, bias=True))
modules_list.append(self.select_normalization(norm='instance', features=features))
modules_list.append(nn.ReLU(inplace=True))
modules_list.append(nn.ReflectionPad2d(1))
modules_list.append(nn.Conv2d(features, features, kernel_size=3, stride=1, bias=True))
modules_list.append(self.select_normalization(norm='instance', features=features))
modules = nn.Sequential(*modules_list)
return modules
def select_normalization(self, norm, features):
if norm == 'batch':
return nn.BatchNorm2d(features)
elif norm == 'instance':
return nn.InstanceNorm2d(features)
else:
assert 0, '%s is not supported.' % norm
def forward(self, x):
out = x + self.block(x)
return out
Generator
class Generator(nn.Module):
def __init__(self, n_down, n_up, n_res, in_features):
super(Generator, self).__init__()
out_features = 64
first_conv = [
nn.ReflectionPad2d(3),
nn.Conv2d(in_features, out_features, kernel_size=7, stride=1, padding=0, bias=True),
self.select_normalization(norm='instance', features=out_features),
nn.ReLU(inplace=True)]
down_block = []
for _ in range(n_down):
in_features = out_features
out_features = in_features * 2
down_block += [
nn.Conv2d(in_features, out_features, kernel_size=3, stride=2, padding=1, bias=True),
self.select_normalization(norm='instance', features=out_features),
nn.ReLU(inplace=True)]
res_block = []
res_features = out_features
for _ in range(n_res):
res_block.append(ResBlock(res_features))
up_block = []
in_features = res_features
out_features = in_features // 2
for _ in range(n_up):
up_block += [
nn.ConvTranspose2d(in_features, out_features, kernel_size=3, stride=2, padding=1, output_padding=1, bias=True),
self.select_normalization(norm='instance', features=out_features),
nn.ReLU(inplace=True)]
in_features = out_features
out_features = in_features // 2
last_conv = [
nn.ReflectionPad2d(3),
nn.Conv2d(in_features, 3, kernel_size=7, stride=1, padding=0, bias=True),
nn.Tanh()]
self.first_conv = nn.Sequential(*first_conv)
self.down_block = nn.Sequential(*down_block)
self.res_block = nn.Sequential(*res_block)
self.up_block = nn.Sequential(*up_block)
self.last_conv = nn.Sequential(*last_conv)
self.init_weights(self.first_conv)
self.init_weights(self.down_block)
self.init_weights(self.res_block)
self.init_weights(self.up_block)
self.init_weights(self.last_conv)
def init_weights(self, net):
classname = net.__class__.__name__
if classname.find('Conv') != -1:
torch.nn.init.normal_(net.weight.data, 0.0, 0.02)
if hasattr(net, 'bias') and net.bias is not None:
torch.nn.init.constant_(net.bias.data, 0.0)
def select_normalization(self, norm, features):
if norm == 'batch':
return nn.BatchNorm2d(features)
elif norm == 'instance':
return nn.InstanceNorm2d(features)
else:
assert 0, '%s is not supported.' % norm
def forward(self, x):
h = self.first_conv(x)
h = self.down_block(h)
h = self.res_block(h)
h = self.up_block(h)
out = self.last_conv(h)
return out
Discriminator
class Discriminator(nn.Module):
def __init__(self, n_layers=3):
super(Discriminator, self).__init__()
out_features = 64
modules = [nn.Conv2d(3, out_features, kernel_size=4, stride=2, padding=1, bias=True),
nn.LeakyReLU(negative_slope=0.2, inplace=True)]
for i in range(n_layers):
in_features = out_features
out_features = in_features * 2
if i == n_layers - 1: stride=1
else: stride=2
modules += [nn.Conv2d(in_features, out_features, kernel_size=4, stride=stride, padding=1, bias=True),
self.select_normalization(norm='instance', features=out_features),
nn.LeakyReLU(negative_slope=0.2, inplace=True)]
modules += [nn.Conv2d(out_features, 1, kernel_size=4, stride=1, padding=1, bias=True)]
self.layers = nn.Sequential(*modules)
self.init_weights(self.layers)
def init_weights(self, net):
classname = net.__class__.__name__
if classname.find('Conv') != -1:
torch.nn.init.normal_(net.weight.data, 0.0, 0.02)
if hasattr(net, 'bias') and net.bias is not None:
torch.nn.init.constant_(net.bias.data, 0.0)
def select_normalization(self, norm, features):
if norm == 'batch':
return nn.BatchNorm2d(features)
elif norm == 'instance':
return nn.InstanceNorm2d(features)
else:
assert 0, '%s is not supported.' % norm
def forward(self, x):
out = self.layers(x)
return out
Training function
class Image_History_Buffer:
def __init__(self, pool_size=50):
self.pool_size = pool_size
self.buffer = []
def get_images(self,pre_images):
return_imgs = []
for img in pre_images:
img = torch.unsqueeze(img,0)
if len(self.buffer) < self.pool_size:
self.buffer.append(img)
return_imgs.append(img)
else:
if random.randint(0,1)>0.5:
i = random.randint(0,self.pool_size-1)
tmp = self.buffer[i].clone()
self.buffer[i]=img
return_imgs.append(tmp)
else:
return_imgs.append(img)
return torch.cat(return_imgs,dim=0)
class loss_scheduler():
def __init__(self, epoch_decay):
self.epoch_decay = epoch_decay
def f(self, epoch):
if epoch<=self.epoch_decay:
return 1
else:
scaling = 1 - (epoch-self.epoch_decay)/float(self.epoch_decay)
return scaling
import itertools
# Define networks
G_A2B = Generator(n_down=2, n_up=2, n_res=9, in_features=3).to(device)
G_B2A = Generator(n_down=2, n_up=2, n_res=9, in_features=3).to(device)
D_A = Discriminator(n_layers=3).to(device)
D_B = Discriminator(n_layers=3).to(device)
g_opt = optim.Adam(itertools.chain(G_A2B.parameters(), G_B2A.parameters()), lr=learning_rate, betas=(0.5, 0.999))
d_A_opt = optim.Adam(D_A.parameters(), lr=learning_rate, betas=(0.5, 0.999))
d_B_opt = optim.Adam(D_B.parameters(), lr=learning_rate, betas=(0.5, 0.999))
g_lr_scheduler = torch.optim.lr_scheduler.LambdaLR(g_opt, lr_lambda=loss_scheduler(100).f)
d_a_lr_scheduler = torch.optim.lr_scheduler.LambdaLR(d_A_opt, lr_lambda=loss_scheduler(100).f)
d_b_lr_scheduler = torch.optim.lr_scheduler.LambdaLR(d_B_opt, lr_lambda=loss_scheduler(100).f)
adv_loss = nn.MSELoss()
l1_norm = nn.L1Loss()
criterion_idn = nn.L1Loss()
buffer_for_fakeA = Image_History_Buffer()
buffer_for_fakeB = Image_History_Buffer()
def training_cycle(G_B2A, G_A2B, D_A, D_B, g_opt, opt_d, d_A_opt, d_B_opt, adv_loss, l1_norm, criterion_idn, training_dataset, lambda_val=10, n_epochs=20, freq_save=5):
for epoch in range(1, n_epochs+1):
G_B2A.train()
G_A2B.train()
D_A.train()
D_B.train()
for idx, (imgA, imgB) in enumerate(training_dataset):
imgA = torch.autograd.Variable(imgA.to(device), requires_grad=True)
imgB = torch.autograd.Variable(imgB.to(device), requires_grad=True)
imgA_fake = G_B2A(imgB)
imgB_fake = G_A2B(imgA)
imgA_rec, imgB_rec = G_B2A(imgB_fake), G_A2B(imgA_fake)
d_A_opt.zero_grad()
disA_out_real = D_A(imgA)
imgA_fake_ = buffer_for_fakeA.get_images(imgA_fake)
disA_out_fake = D_A(imgA_fake_.detach())
d_lossA_real = adv_loss(disA_out_real, torch.tensor(1.0).expand_as(disA_out_real).to(device))
d_lossA_fake = adv_loss(disA_out_fake, torch.tensor(0.0).expand_as(disA_out_fake).to(device))
disA_loss = (d_lossA_real + d_lossA_fake) * 0.5
disA_loss.backward()
d_A_opt.step()
d_B_opt.zero_grad()
disB_out_real = D_B(imgB)
imgB_fake_ = buffer_for_fakeB.get_images(imgB_fake)
disB_out_fake = D_B(imgB_fake_.detach())
d_lossB_real = adv_loss(disB_out_real, torch.tensor(1.0).expand_as(disB_out_real).to(device))
d_lossB_fake = adv_loss(disB_out_fake, torch.tensor(0.0).expand_as(disA_out_fake).to(device))
disB_loss = (d_lossB_real + d_lossB_fake) * 0.5
disB_loss.backward()
d_B_opt.step()
# Update the generator (G)
g_opt.zero_grad()
disB_out_fake = D_B(imgB_fake)
disA_out_fake = D_A(imgA_fake)
g_lossA = adv_loss(disA_out_fake, torch.tensor(1.0).expand_as(disA_out_fake).to(device))
g_lossB = adv_loss(disB_out_fake, torch.tensor(1.0).expand_as(disB_out_fake).to(device))
gen_adv_loss = g_lossA + g_lossB
cycle_consistency_loss = l1_norm(imgA_rec, imgA) + l1_norm(imgB_rec, imgB)
gen_loss = gen_adv_loss + lambda_val * cycle_consistency_loss
gen_loss.backward()
g_opt.step()
# imgB_fake
print('Epoch: {:02} | D loss (A): {:.6f} | D loss (B): {:.6f} | G loss: {:.6f} | Consistency: {:.6f} |'\
.format(epoch, disA_loss.item(), disB_loss.item(), gen_loss.item(), cycle_consistency_loss.item()))
mean = torch.tensor([0.5, 0.5, 0.5], dtype=torch.float32)[None,:,None,None].to(device)
std = torch.tensor([0.5, 0.5, 0.5], dtype=torch.float32)[None,:,None,None].to(device)
#save weights
if (epoch % freq_save == 0) or (epoch == 1):
#save model
torch.save(G_B2A.state_dict(), "Cycle_G_B2A_%04d.pt" % epoch)
torch.save(G_A2B.state_dict(), "Cycle_G_A2B_%04d.pt" % epoch)
torch.save(D_A.state_dict(), "Cycle_D_A_%04d.pt" % epoch)
torch.save(D_B.state_dict(), "Cycle_D_B_%04d.pt" % epoch)
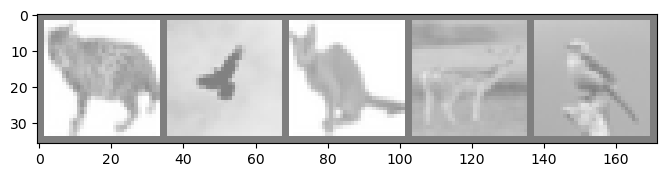
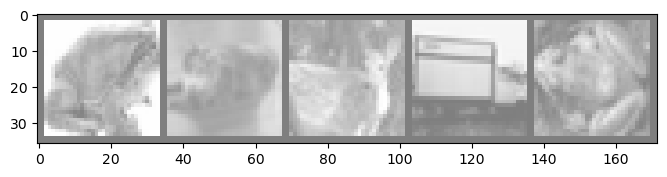
# visualize image A
imgA_real = (imgA * std) + mean
real_img = imgA_real.detach().cpu()
real_img = real_img.reshape(-1, 3, 32, 32)
imshow(make_grid(real_img[:5]))
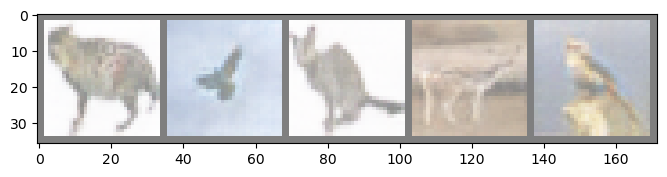
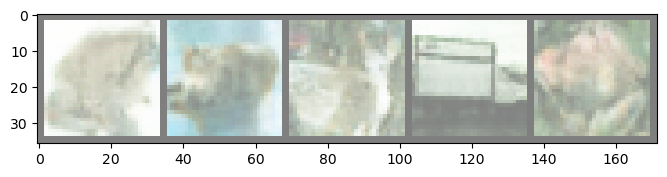
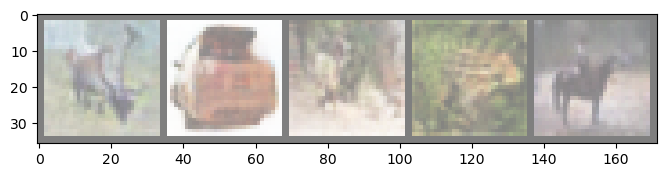
#image generate from image A
imgB_fake = (imgB_fake * std) + mean
gen_img = imgB_fake.detach().cpu()
gen_img = gen_img.reshape(-1, 3, 32, 32)
imshow(make_grid(gen_img[:5]))
training_cycle(G_B2A, G_A2B, D_A, D_B, g_opt, opt_d, d_A_opt, d_B_opt, adv_loss, l1_norm, criterion_idn, cycle_training_data, n_epochs=20, freq_save=5)
Epoch: 01 | D loss (A): 0.195687 | D loss (B): 0.046812 | G loss: 2.785887 | Consistency: 0.189132 |
Epoch: 02 | D loss (A): 0.000898 | D loss (B): 0.048222 | G loss: 4.421986 | Consistency: 0.203591 |
Epoch: 03 | D loss (A): 0.019099 | D loss (B): 0.070686 | G loss: 4.278021 | Consistency: 0.208942 |
Epoch: 04 | D loss (A): 0.001299 | D loss (B): 0.059335 | G loss: 3.564825 | Consistency: 0.195505 |
Epoch: 05 | D loss (A): 0.000034 | D loss (B): 0.075043 | G loss: 3.986195 | Consistency: 0.195103 |
Epoch: 06 | D loss (A): 0.000263 | D loss (B): 0.109112 | G loss: 4.416480 | Consistency: 0.186738 |
Epoch: 07 | D loss (A): 0.000103 | D loss (B): 0.068985 | G loss: 4.022033 | Consistency: 0.204632 |
Epoch: 08 | D loss (A): 0.000092 | D loss (B): 0.029047 | G loss: 3.855639 | Consistency: 0.193860 |
Epoch: 09 | D loss (A): 0.000490 | D loss (B): 0.040607 | G loss: 3.985296 | Consistency: 0.180358 |
Epoch: 10 | D loss (A): 0.000131 | D loss (B): 0.065487 | G loss: 4.474211 | Consistency: 0.203697 |
Epoch: 11 | D loss (A): 0.000063 | D loss (B): 0.066187 | G loss: 3.839917 | Consistency: 0.168257 |
Epoch: 12 | D loss (A): 0.001245 | D loss (B): 0.105034 | G loss: 3.586901 | Consistency: 0.175566 |
Epoch: 13 | D loss (A): 0.000112 | D loss (B): 0.047922 | G loss: 3.922706 | Consistency: 0.198860 |
Epoch: 14 | D loss (A): 0.001405 | D loss (B): 0.113605 | G loss: 2.874945 | Consistency: 0.168494 |
Epoch: 15 | D loss (A): 0.000532 | D loss (B): 0.078052 | G loss: 3.683669 | Consistency: 0.181038 |
Epoch: 16 | D loss (A): 0.001328 | D loss (B): 0.047557 | G loss: 3.631893 | Consistency: 0.175162 |
Epoch: 17 | D loss (A): 0.000075 | D loss (B): 0.030246 | G loss: 4.005678 | Consistency: 0.169630 |
Epoch: 18 | D loss (A): 0.000258 | D loss (B): 0.038137 | G loss: 3.901859 | Consistency: 0.163479 |
Epoch: 19 | D loss (A): 0.000701 | D loss (B): 0.052387 | G loss: 3.664880 | Consistency: 0.159150 |
Epoch: 20 | D loss (A): 0.000173 | D loss (B): 0.044138 | G loss: 3.231086 | Consistency: 0.155710 |
Predict
def generate_cycle_img(G_A2B, training_dataset, device, number_img=100):
G_A2B.eval()
total_pred = None
for idx, (imgA, _) in enumerate(training_dataset):
imgA = torch.autograd.Variable(imgA.to(device), requires_grad=True)
imgB_fake = G_A2B(imgA)
gen_img = imgB_fake.detach().cpu()
gen_img = gen_img.reshape(-1, 3, 32, 32)
if idx == 0:
total_pred = gen_img
elif idx == number_img:
break
else:
total_pred = np.concatenate((total_pred, gen_img), axis=0)
return torch.tensor(total_pred)
#load model generating
G_A2B.load_state_dict(torch.load("Cycle_G_A2B_0020.pt"))
gen_img = generate_cycle_img(G_A2B, cycle_training_data, device)
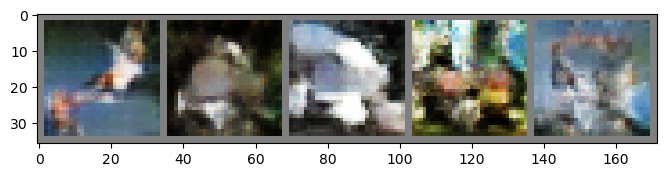
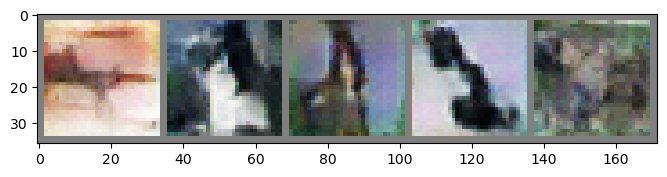
#visualize generate image
num_show = 5
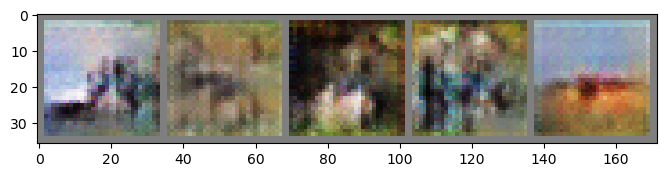
imshow(make_grid(gen_img[:num_show]))
Cycle GAN with different approachs compare with DCGAN or ConditionalGAN, it shows very good result.
Conclusion:
- DC-GAN is better than MLP-GAN, Conditional-GAN can use to improve for both DC-GAN and MLP-GAN.
- Cycle-GAN is very good approach to learn style from a image and apply to other image.
Future Imporvement
- Apply other SOTA GAN architecture: Style-GAN, BIG-GAN..
- Training GAN with high-resolution: (512, 512) or (1024, 1024)